Pose-on-the-Go: Approximating User Pose with Smartphone Sensor Fusion and Inverse Kinematics
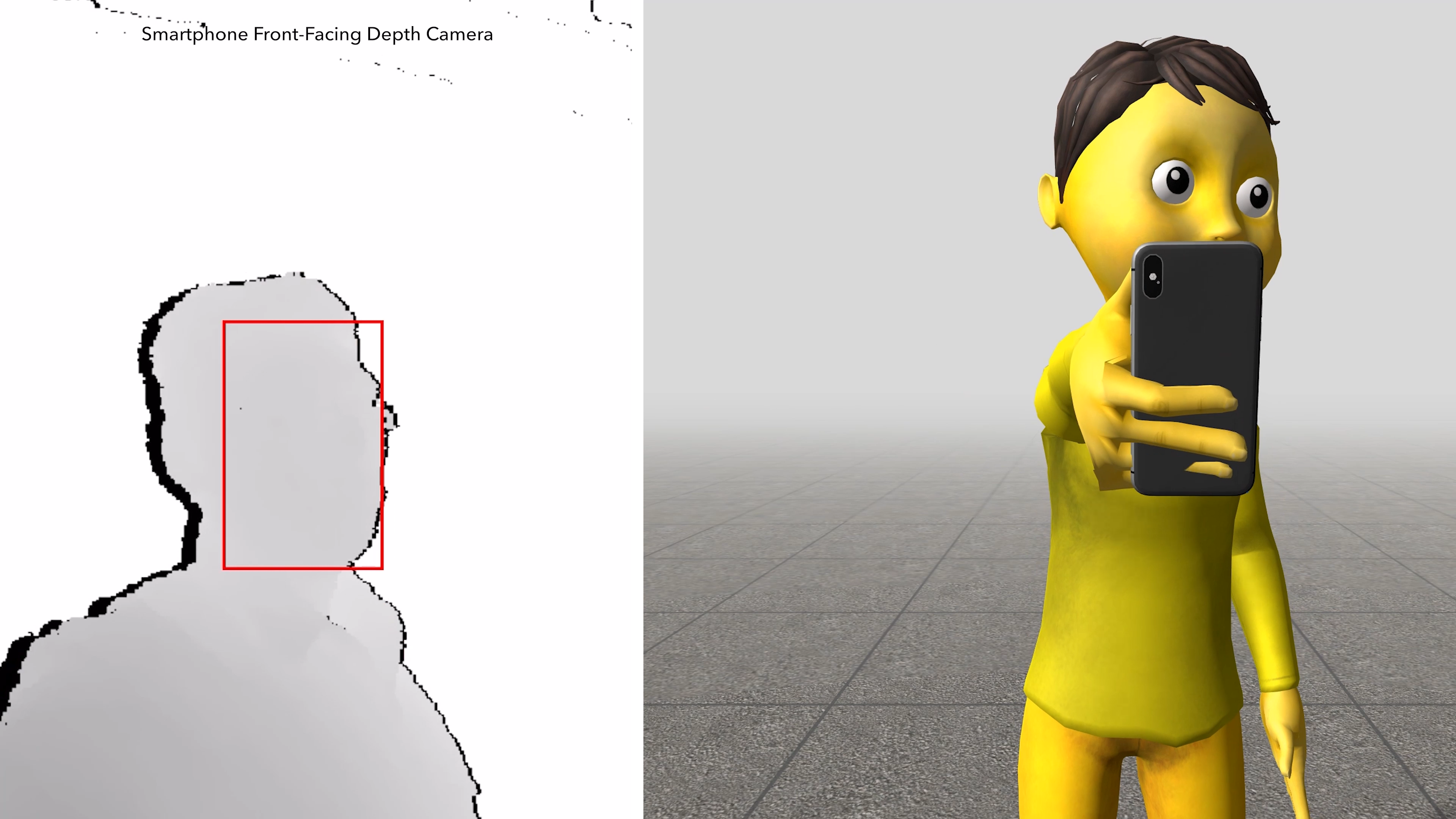
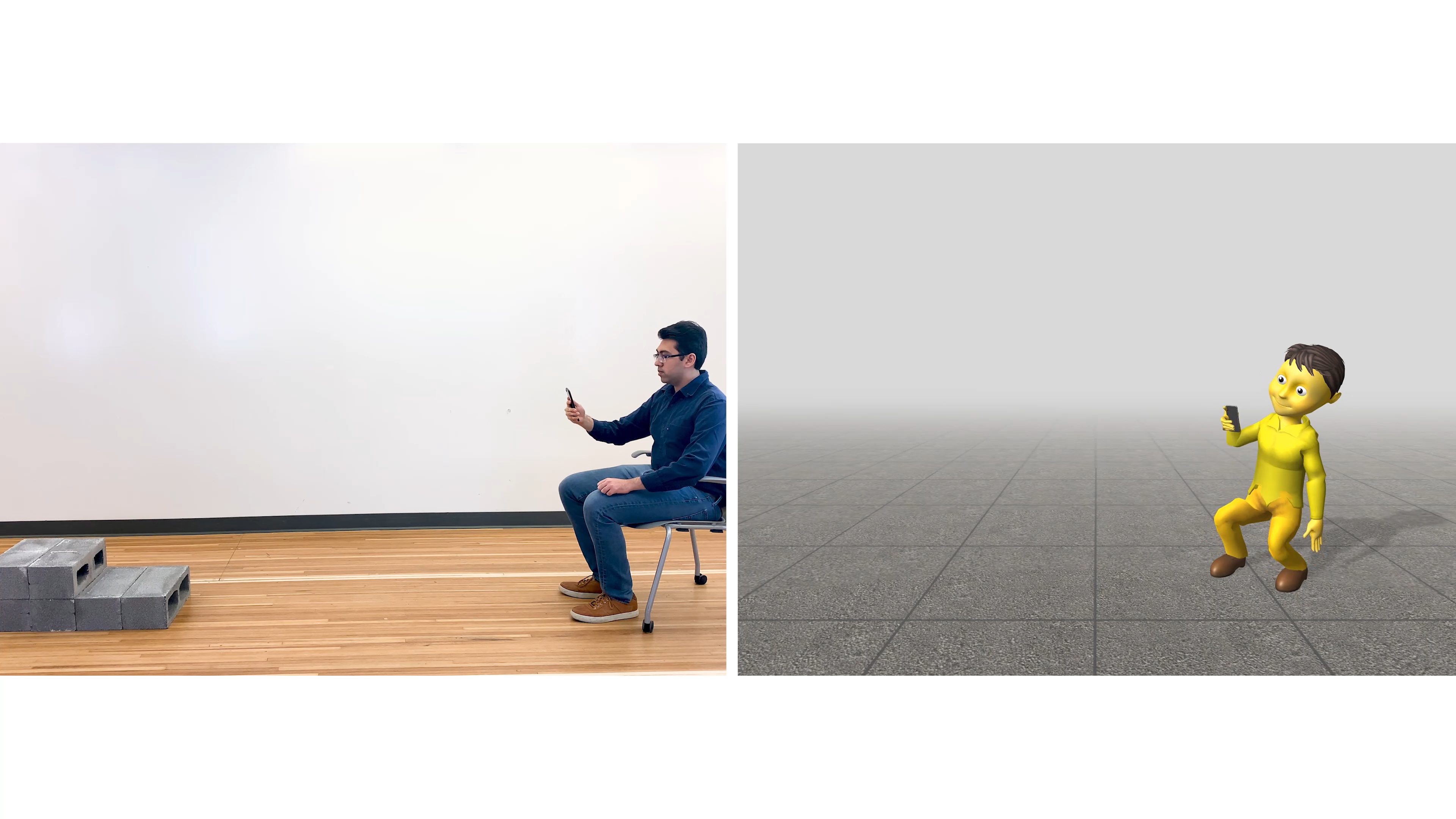
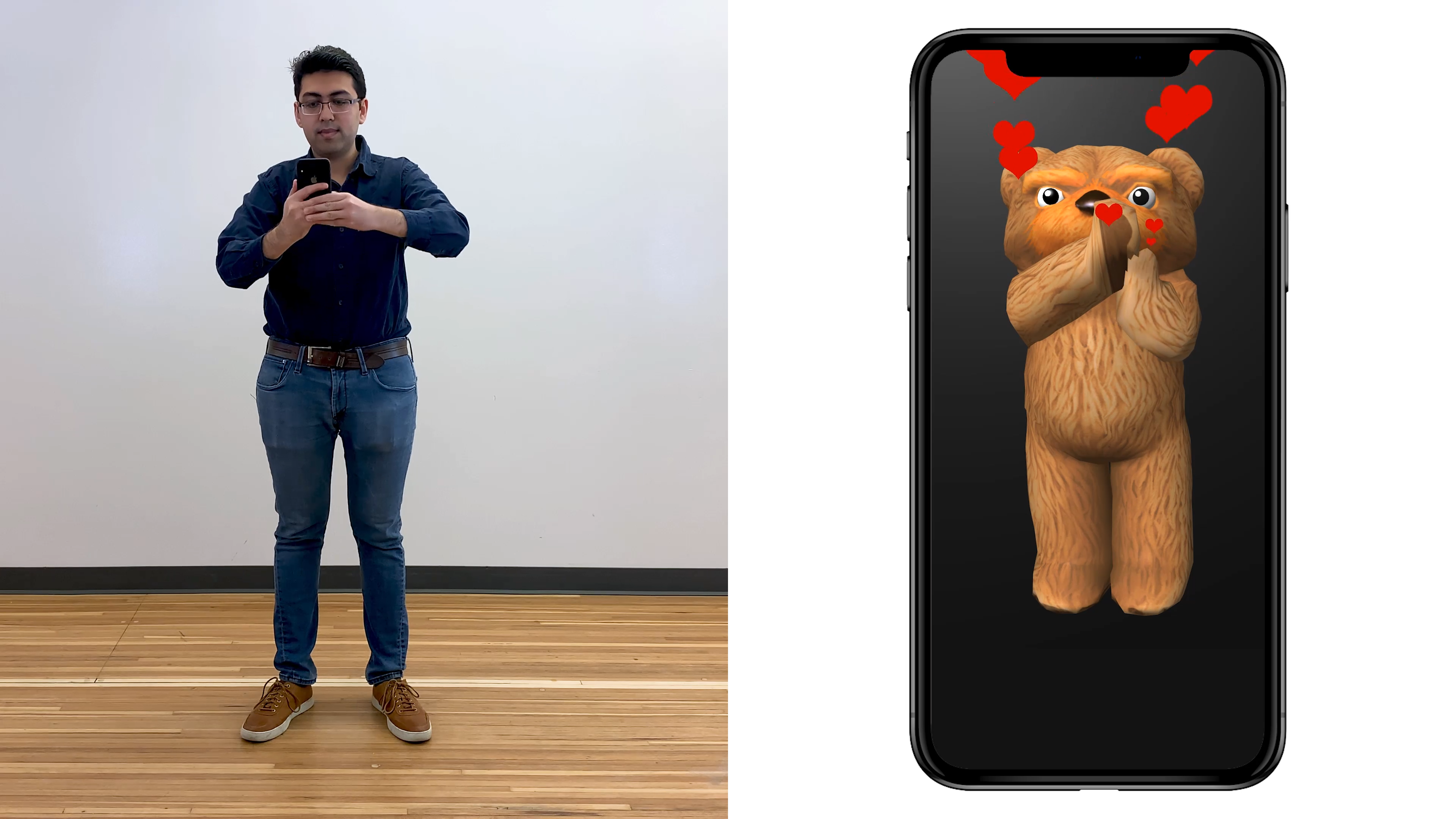
We present Pose-on-the-Go, a full-body pose estimation system that uses sensors already found in today’s smartphones. This stands in contrast to prior systems, which require worn or external sensors. We achieve this result via extensive sensor fusion, leveraging a phone’s front and rear cameras, the user-facing depth camera, touchscreen, and IMU. Even still, we are missing data about a user’s body (e.g., angle of the elbow joint), and so we use inverse kinematics to estimate and animate probable body poses. We provide a detailed evaluation of our system, benchmarking it against a professional-grade Vicon tracking system. We conclude with a series of demonstration applications that underscore the unique potential of our approach, which could be enabled on many modern smartphones with a simple software update.
Media and Images










Citation
Karan Ahuja, Sven Mayer, Mayank Goel, and Chris Harrison. 2021. Pose-on-the-Go: Approximating User Pose with Smartphone Sensor Fusion and Inverse Kinematics. In Proceedings of the 2021 CHI Conference on Human Factors in Computing Systems (CHI '21). Association for Computing Machinery, New York, NY, USA, Article 9, 1–12. DOI:https://doi.org/10.1145/3411764.3445582